Von Mises elasto-plasticity#
This code is an updated version of the tutorial written previously by J. Bleyer on https://comet-fenics.readthedocs.io/en/latest/demo/2D_plasticity/vonMises_plasticity.py.html.
Authors :
Gaspard Blondet, gaspard.blondet@ens-paris-saclay.fr
Andrey Latyshev, andrey.latyshev@uni.lu
Corrado Maurini, corrado.maurini@sorbonne-universite.fr
Warning: The code hits a bug in the last dolfinx version, see FEniCS/dolfinx#2664. A nasty workaround in the LHS assembling inside the solver.
Introduction#
This example is concerned with the incremental analysis of an elasto-plastic von Mises material. The structure response is computed using an iterative predictor-corrector return mapping algorithm embedded in a nonlinear solver. Due to the simple expression of the von Mises criterion, the return mapping procedure is completely analytical (with linear isotropic hardening), so instead of using manual implementation of the Newton method, we can use an efficient one provided by the SNES library.
Problem position#
Import required modules and define useful functions.
from dolfinx import fem, geometry
from dolfinx.io import gmsh as gmshio
import numpy as np
from petsc4py.PETSc import ScalarType
from petsc4py import PETSc
from mpi4py import MPI
import ufl
import basix
import gmsh
#BUG: the line below is needed to correctly call `fem.petsc.create_vector`
# in FEniCSx v0.7.0
import dolfinx.fem.petsc
petsc_options_SNES = {
"snes_type": "vinewtonrsls",
"snes_linesearch_type": "basic",
"ksp_type": "preonly",
"pc_type": "lu",
"pc_factor_mat_solver_type": "mumps",
"snes_atol": 1.0e-08,
"snes_rtol": 1.0e-09,
"snes_stol": 0.0,
"snes_max_it": 50,
"snes_monitor": "",
# "snes_monitor_cancel": "",
}
def interpolate_quadrature(ufl_expr, fem_func:fem.Function):
q_dim = fem_func.function_space._ufl_element.degree
mesh = fem_func.ufl_function_space().mesh
quadrature_points, weights = basix.make_quadrature(basix.CellType.triangle, q_dim, basix.QuadratureType.default)
map_c = mesh.topology.index_map(mesh.topology.dim)
num_cells = map_c.size_local + map_c.num_ghosts
cells = np.arange(0, num_cells, dtype=np.int32)
expr_expr = fem.Expression(ufl_expr, quadrature_points)
expr_eval = expr_expr.eval(mesh, cells)
np.copyto(fem_func.x.array, expr_eval.reshape(-1))
def find_cells(points, domain):
"""
Find the cells of the mesh `domain` where the points `points` lie
"""
bb_tree = geometry.bb_tree(domain, domain.topology.dim)
cells = []
points_on_proc = []
# Find cells whose bounding-box collide with the the points
cell_candidates = geometry.compute_collisions_points(bb_tree, points.T)
# Choose one of the cells that contains the point
colliding_cells = geometry.compute_colliding_cells(domain, cell_candidates, points.T)
for i, point in enumerate(points.T):
if len(colliding_cells.links(i))>0:
points_on_proc.append(point)
cells.append(colliding_cells.links(i)[0])
points_on_proc = np.array(points_on_proc, dtype=np.float64)
return points_on_proc, cells
def solution(domain, solu_name, xval, yval, zval=0):
"""
gives the value of the solution at the point (xval,yval)
"""
points = np.array([[xval],[yval],[zval]]) # dummy 3rd element
pointsT, cells = find_cells(points,domain)
out = solu_name.eval(pointsT, cells)
return out
Mesh and parameters#
The material is represented by an isotropic elasto-plastic von Mises yield condition of uniaxial strength \(\sigma_0\) and with isotropic hardening of modulus \(H\). The yield condition is thus given by :
where \(p\) is the cumulated equivalent plastic strain.
The considered problem is that of a plane strain hollow cylinder of internal (resp. external) radius \(R_i\) (resp. \(R_e\)) under internal uniform pressure \(q\). Due to symmetry, only a quarter of cylinder is generated using Gmsh and imported in dolfinx through gmshio.
Define or import your parameters:
# Geometric parameters
geom = {"Re" : 1.3, # m
"Ri" : 1., # m
"lc" : 0.03, # size of a cell
}
# Mechanicals parameters
mech = {"E" : 1., # MPa
"nu" : 0.3, #
"sig0" : 250. / 70.e3, # MPa
"H" : 1. / 99., # MPa
}
# Study parameters
stud = {"deg u" : 2, # Interpolation of u
"deg sig" : 2, # Interpolation of sig, eps, p
"N incr" : 50, # Number of load steps
}
Create mesh
R_e, R_i = geom["Re"], geom["Ri"] # external/internal radius
# mesh parameters
lc = 0.03
gdim = 2
verbosity = 10
# mesh using gmsh
mesh_comm = MPI.COMM_WORLD
model_rank = 0
gmsh.initialize()
facet_tags = {"Lx": 1, "Ly":2, "inner": 3, "outer": 4}
cell_tags = {"all": 20}
if mesh_comm.rank == model_rank:
model = gmsh.model()
model.add("Quart_cylinder")
model.setCurrent("Quart_cylinder")
# Create the points
pix = model.occ.addPoint(R_i, 0.0, 0, lc)
pex = model.occ.addPoint(R_e, 0, 0, lc)
piy = model.occ.addPoint(0., R_i, 0, lc)
pey = model.occ.addPoint(0., R_e, 0, lc)
center = model.occ.addPoint(0., 0., 0, lc)
# Create the lines
lx = model.occ.addLine(pix, pex, tag = facet_tags["Lx"])
lout = model.occ.addCircleArc(pex, center, pey, tag = facet_tags["outer"])
ly = model.occ.addLine(pey, piy, tag = facet_tags["Ly"])
lin = model.occ.addCircleArc(piy, center, pix, tag = facet_tags["inner"])
# Create the surface
cloop1 = model.occ.addCurveLoop([lx, lout, ly, lin])
surface_1 = model.occ.addPlaneSurface([cloop1], tag = cell_tags["all"])
model.occ.synchronize()
# Assign mesh and facet tags
surface_entities = [entity[1] for entity in model.getEntities(2)]
model.addPhysicalGroup(2, surface_entities, tag=cell_tags["all"])
model.setPhysicalName(2, 2, "Quart_cylinder surface")
for (key, value) in facet_tags.items():
model.addPhysicalGroup(1, [value], tag=value) # 1 : it is the dimension of the object (here a curve)
model.setPhysicalName(1, value, key)
# Finalize mesh
model.occ.synchronize()
gmsh.option.setNumber('General.Verbosity', verbosity)
model.mesh.generate(gdim)
if mesh_comm == model_rank:
my_model = model
else :
my_model = None
# import the mesh in fenicsx with gmshio
msh, cell_tags, facet_tags, *_ = gmshio.model_to_mesh(
model, mesh_comm, 0., gdim=2
)
msh.topology.create_connectivity(msh.topology.dim - 1, msh.topology.dim)
msh.name = "Quart_cylinder"
cell_tags.name = f"{msh.name}_cells"
facet_tags.name = f"{msh.name}_facets"
Info : Meshing 1D...
Info : [ 0%] Meshing curve 1 (Line)
Info : [ 30%] Meshing curve 2 (Line)
Info : [ 60%] Meshing curve 3 (Circle)
Info : [ 80%] Meshing curve 4 (Circle)
Info : Done meshing 1D (Wall 0.000355236s, CPU 0.00057s)
Info : Meshing 2D...
Info : Meshing surface 20 (Plane, Frontal-Delaunay)
Info : Done meshing 2D (Wall 0.032397s, CPU 0.032473s)
Info : 809 nodes 1619 elements
E = fem.Constant(msh, ScalarType(mech["E"]))
nu = fem.Constant(msh, ScalarType(mech["nu"]))
lmbda = E * nu / (1. + nu) / (1. - 2. * nu)
mu = E / 2. / (1. + nu)
sig0 = fem.Constant(msh, ScalarType(mech["sig0"])) # yield strength
H = fem.Constant(msh, ScalarType(mech["H"])) # hardening modulus
Function spaces and boundary conditions#
Function spaces will involve a standard CG space for the displacement whereas internal state variables such as plastic strains will be represented using a Quadrature element. This choice will make it possible to express the complex non-linear material constitutive equation at the Gauss points only, without involving any interpolation of non-linear expressions throughout the element. It will ensure an optimal convergence rate for the Newton-Raphson method used in the non linear solver.
We will need Quadrature elements for 4-dimensional vectors and scalars, the number of Gauss points will be determined by the required degree of the Quadrature element (e.g. degree=1 yields only 1 Gauss point, degree=2 yields 3 Gauss points and degree=3 yields 6 Gauss points (note that this is suboptimal)):
deg_u = stud["deg u"]
deg_stress = stud["deg sig"]
V = fem.functionspace(msh, ("Lagrange", deg_u, (2,)))
element_quad = basix.ufl.quadrature_element(msh.topology.cell_name(), degree=deg_stress,value_shape=(4,))
element_quad_scalar = basix.ufl.quadrature_element(msh.topology.cell_name(), degree=deg_stress)
W = fem.functionspace(msh, element_quad)
W_scalar = fem.functionspace(msh, element_quad_scalar)
Various functions are defined to keep track of the current internal state.
Because we use Quadrature elements a custom integration measure dx_m must be defined to match the quadrature degree and scheme used by the Quadrature elements :
sig = fem.Function(W, name = "Stress")
p = fem.Function(W_scalar, name = "Cumulative_plastic_strain")
u = fem.Function(V, name = "Total_displacement")
du = fem.Function(V, name = "Current_increment")
v = ufl.TrialFunction(V)
u_ = ufl.TestFunction(V)
dx = ufl.Measure("dx",domain=msh, metadata={"quadrature_degree": deg_u, "quadrature_scheme": "default"} )
dx_m = ufl.Measure("dx",domain=msh, metadata={"quadrature_degree": deg_stress, "quadrature_scheme": "default"} )
ds = ufl.Measure("ds", domain=msh, subdomain_data=facet_tags)
ds_m = ufl.Measure("ds", domain=msh, subdomain_data=facet_tags, metadata={"quadrature_degree": deg_stress, "quadrature_scheme": "default"})
n = ufl.FacetNormal(msh)
Boundary conditions correspond to symmetry conditions on the bottom and left parts (resp. numbered 1 and 2). Loading consists of a uniform pressure on the internal boundary (numbered 3). It will be progressively increased from \(0\) to \(q_{lim}=\dfrac{2}{\sqrt{3}}\sigma_0 \log{\dfrac{R_e}{R_i}}\) which is the analytical collapse load for a perfectly-plastic material (no hardening):
bottom_facets = facet_tags.find(1)
left_facets = facet_tags.find(2)
bottom_dofs_y = fem.locate_dofs_topological(V.sub(1), msh.topology.dim-1, bottom_facets)
left_dofs_x = fem.locate_dofs_topological(V.sub(0), msh.topology.dim-1, left_facets)
sym_bottom = fem.dirichletbc(np.array(0.,dtype=ScalarType), bottom_dofs_y, V.sub(1))
sym_left = fem.dirichletbc(np.array(0.,dtype=ScalarType), left_dofs_x, V.sub(0))
bcs = [sym_bottom, sym_left]
q_lim = float(2. / np.sqrt(3) * np.log(R_e / R_i) * mech["sig0"])
loading = fem.Constant(msh, ScalarType(0. * q_lim))
def F_ext(v):
return -loading * ufl.inner(n, v) * ds_m(3) # force is applied at the inner boundary 3
Constitutive relation updates#
Before writing the variational form, we now define some useful functions which will enable performing the constitutive relation update using a return mapping procedure. This step is quite classical in FEM plasticity for a von Mises criterion with isotropic hardening and follow notations from Bonnet et al, The finite element method in solid mechanics, 2014.
First, the strain tensor will be represented in a 3D fashion by appending zeros on the out-of-plane components since, even if the problem is 2D, the plastic constitutive relation will involve out-of-plane plastic strains. The elastic constitutive relation is also defined and function as_3D_tensor and tensor_to_vector will enable to represent a 4-dimensional vector containing respectively \(xx\), \(yy\), \(zz\) and \(xy\) components as a 3D tensor and vice versa.
def eps(v):
e = ufl.sym(ufl.grad(v))
return ufl.as_tensor([[e[0, 0], e[0, 1], 0],
[e[0, 1], e[1, 1], 0],
[0, 0, 0]])
def sigma_tr(eps_el):
return 1./3. * (3. * lmbda + 2. * mu) * ufl.tr(eps_el) * ufl.Identity(3)
def sigma_dev(eps_el):
return 2. * mu * ufl.dev(eps_el)
def as_3D_tensor(X):
return ufl.as_tensor([[X[0], X[3], 0],
[X[3], X[1], 0],
[0, 0, X[2]]])
def tensor_to_vector(X):
'''
Take a 3x3 tensor and return a vector of size 4 in 2D
'''
return ufl.as_vector([X[0, 0], X[1, 1], X[2, 2], X[0, 1]])
At each time step \(i\) we want to solve the problem of \(\int_{\Omega}\underline{\underline{\sigma}}_i : \underline{\underline{\epsilon}} \ (\underline{v}) dx - l(\underline{v}) = 0\). We use for that a nonlinear solver since \(\underline{\underline{\sigma}}_i\) is defined as :
With \(\underline{\underline{\sigma}}_i^{elas} = \underline{\underline{\sigma}}_{i-1} + \mathbb{C} : \underline{\underline{\epsilon}}(\underline{u}_i-\underline{u}_{i-1})\) an elastic predictor to find the stress if there is not any plasticity in the increment \(i-1 \rightarrow i\). To find \(\Delta \underline{\underline{\epsilon}}_{pi}\) we write the normal rule, with an explicit scheme it goes as : \(\Delta \underline{\underline{\epsilon}}_{pi} = \Delta p_i \dfrac{3}{2} \dfrac{\underline{\underline{s}}_{i-1}}{\lVert\underline{\underline{\sigma}}_{i-1}\rVert}\) where \(\underline{\underline{s}}\) is the deviatoric part of \(\underline{\underline{\sigma}}\). To find \(\Delta p_i\) we write the plasticity criterion when it is an equality : \(\lVert\underline{\underline{\sigma}}_i^{elas}\rVert - 3\mu |\Delta p_i| = \sigma_0+H.p_{i-1} +H. \Delta p_i \). Note that the criterion is written at the time \(i-1\) for computing \(\sigma_i\) in the elastic case since \(\Delta p_i = 0\) then. But now we shall write it at time \(i\). Finally we get :
If \(\lVert\underline{\underline{\sigma}}_i^{elas}\rVert < \sigma_0+H.p_{i-1}\), then \(\Delta p_i = 0\), else :
def normVM(sig): # Von Mises equivalent stress
s_ = ufl.dev(sig)
return ufl.sqrt(3 / 2. * ufl.inner(s_, s_))
def compute_new_state(du, sig_old, p_old) :
'''
This function return the actualised mechanical state for a given displacement increment
We separate spheric and deviatoric parts of the stress to optimize convergence of the solver
'''
sig_n = as_3D_tensor(sig_old)
sig_el_tr = 1./3 * ufl.tr(sig_n) * ufl.Identity(3) + sigma_tr(eps(du))
sig_el_dev = ufl.dev(sig_n) + sigma_dev(eps(du))
sig_el = sig_el_tr + sig_el_dev
criterion = normVM(sig_el) - sig0 - H * p_old
dp_ = ufl.conditional(criterion < 0., 0., criterion / (3. * mu + H))
direction = ufl.dev(sig_n)/normVM(sig_n)
new_sig_tr = sig_el_tr
new_sig_dev = ufl.conditional(criterion < 0., sig_el_dev, sig_el_dev - 2. * mu * 3./2. * dp_ * direction)
return new_sig_tr, new_sig_dev, dp_
Global problem and non linear solver#
We are now in position to derive the global problem with its associated non linear solver. Each iteration will require establishing equilibrium by driving to zero the residual between the internal forces associated with the current stress state \(\sigma\) and the external force vector.
new_sig_tr, new_sig_dev, dp_ = compute_new_state(du, sig, p)
residual_u = ufl.inner(new_sig_tr, eps(v)) * dx_m + ufl.inner(new_sig_dev, eps(v)) * dx #- F_ext(v)
J_u = ufl.derivative(residual_u, du, u_)
class SNESSolver:
"""
Problem class for elasticity, compatible with PETSC.SNES solvers.
"""
def __init__(
self,
F_form: ufl.Form,
u: fem.Function,
bcs=[],
J_form: ufl.Form = None,
bounds=None,
petsc_options={},
form_compiler_parameters={},
jit_parameters={},
monitor=None,
prefix=None,
):
self.u = u
self.bcs = bcs
self.bounds = bounds
# Give PETSc solver options a unique prefix
if prefix is None:
prefix = "snes_{}".format(str(id(self))[0:4])
self.prefix = prefix
if self.bounds is not None:
self.lb = bounds[0]
self.ub = bounds[1]
V = self.u.function_space
self.comm = V.mesh.comm
self.F_form = fem.form(F_form)
if J_form is None:
J_form = ufl.derivative(F_form, self.u, ufl.TrialFunction(V))
self.J_form = fem.form(J_form)
self.petsc_options = petsc_options
self.monitor = monitor
self.solver = self.solver_setup()
def set_petsc_options(self, debug=False):
# Set PETSc options
opts = PETSc.Options()
opts.prefixPush(self.prefix)
if debug is True:
ColorPrint.print_info(self.petsc_options)
for k, v in self.petsc_options.items():
opts[k] = v
opts.prefixPop()
def solver_setup(self):
# Create nonlinear solver
snes = PETSc.SNES().create(self.comm)
# Set options
snes.setOptionsPrefix(self.prefix)
self.set_petsc_options()
snes.setFromOptions()
self.b = fem.petsc.create_vector(self.F_form.function_spaces[0])
self.a = fem.petsc.create_matrix(self.J_form)
snes.setFunction(self.F, self.b)
snes.setJacobian(self.J, self.a)
# We set the bound (Note: they are passed as reference and not as values)
if self.monitor is not None:
snes.setMonitor(self.monitor)
if self.bounds is not None:
snes.setVariableBounds(self.lb.x.petsc_vec, self.ub.x.petsc_vec)
return snes
def F(self, snes: PETSc.SNES, x: PETSc.Vec, b: PETSc.Vec):
"""Assemble the residual F into the vector b.
Parameters
==========
snes: the snes object
x: Vector containing the latest solution.
b: Vector to assemble the residual into.
"""
# We need to assign the vector to the function
x.ghostUpdate(addv=PETSc.InsertMode.INSERT, mode=PETSc.ScatterMode.FORWARD)
x.copy(self.u.x.petsc_vec)
self.u.x.scatter_forward()
# Zero the residual vector
b.array[:] = 0
fem.petsc.assemble_vector(b, self.F_form)
# this is a nasty workaround to include the force term with the bug https://github.com/FEniCS/dolfinx/issues/2664
force_form = fem.form(-F_ext(v))
b_ds = fem.petsc.create_vector(force_form.function_spaces[0])
fem.petsc.assemble_vector(b_ds,force_form)
b.array[:] += b_ds.array
# Apply boundary conditions
fem.petsc.apply_lifting(b, [self.J_form], [self.bcs], [x], alpha=-1.0)
b.ghostUpdate(addv=PETSc.InsertMode.ADD, mode=PETSc.ScatterMode.REVERSE)
fem.petsc.set_bc(b, self.bcs, x, -1.0)
def J(self, snes, x: PETSc.Vec, A: PETSc.Mat, P: PETSc.Mat):
"""Assemble the Jacobian matrix.
Parameters
==========
x: Vector containing the latest solution.
A: Matrix to assemble the Jacobian into.
"""
A.zeroEntries()
fem.petsc.assemble_matrix(A, self.J_form, self.bcs)
A.assemble()
def solve(self):
print(f"Solving {self.prefix}") # DOLFINx 0.10: use standard Python logging
try:
self.solver.solve(None, self.u.x.petsc_vec)
self.u.x.scatter_forward()
return (self.solver.getIterationNumber(), self.solver.getConvergedReason())
except Warning:
print(f"WARNING: {self.prefix} solver failed to converge, what's next?") # DOLFINx 0.10
raise RuntimeError(f"{self.prefix} solvers did not converge")
my_problem = SNESSolver(residual_u, du, J_form = J_u, bcs = bcs, petsc_options=petsc_options_SNES)
Nincr = stud["N incr"]
load_steps = np.linspace(0, 1.1, Nincr+1)[1:] ** 0.5
results = np.zeros((Nincr+1, 2))
# Computing UFL-expressions of the corrected stress tensor and the plastic variable.
# These expressions will be updated on each loading step.
new_sig_tr, new_sig_dev, dp_= compute_new_state(du, sig, p)
for i, t in enumerate(load_steps):
loading.value = t * q_lim
du.x.array[:] = 0.
print(f"\n----------- Solve for t={t:5.3f} -----------")
out = my_problem.solve()
print("Number of iterations : ", out[0])
print(f"Converged reason = {out[1]:1.3f}")
interpolate_quadrature(tensor_to_vector(new_sig_dev + new_sig_tr), sig)
interpolate_quadrature(p + dp_, p)
u.x.petsc_vec.axpy(1, du.x.petsc_vec)
u.x.scatter_forward()
sig.x.scatter_forward()
p.x.scatter_forward()
# Post-processing
u_pointe = solution(msh, u, R_i, 0.)[0]
du_pointe = solution(msh, du, R_i, 0.)[0]
results[i + 1, :] = (u_pointe, t)
----------- Solve for t=0.148 -----------
Solving snes_1407
0 SNES Function norm 2.578324586684e-05
1 SNES Function norm 3.034728874144e-17
Number of iterations : 1
Converged reason = 2.000
----------- Solve for t=0.210 -----------
Solving snes_1407
0 SNES Function norm 1.067977012004e-05
1 SNES Function norm 1.253301360369e-17
Number of iterations : 1
Converged reason = 2.000
----------- Solve for t=0.257 -----------
Solving snes_1407
0 SNES Function norm 8.194875838521e-06
1 SNES Function norm 9.723824983485e-18
Number of iterations : 1
Converged reason = 2.000
----------- Solve for t=0.297 -----------
Solving snes_1407
0 SNES Function norm 6.908599908272e-06
1 SNES Function norm 8.161223284169e-18
Number of iterations : 1
Converged reason = 2.000
----------- Solve for t=0.332 -----------
Solving snes_1407
0 SNES Function norm 6.086598705164e-06
1 SNES Function norm 7.132376275571e-18
Number of iterations : 1
Converged reason = 2.000
----------- Solve for t=0.363 -----------
Solving snes_1407
0 SNES Function norm 5.502705847636e-06
1 SNES Function norm 6.418018791367e-18
Number of iterations : 1
Converged reason = 2.000
----------- Solve for t=0.392 -----------
Solving snes_1407
0 SNES Function norm 5.060260269210e-06
1 SNES Function norm 5.932455797711e-18
Number of iterations : 1
Converged reason = 2.000
----------- Solve for t=0.420 -----------
Solving snes_1407
0 SNES Function norm 4.709975418077e-06
1 SNES Function norm 5.473209509243e-18
Number of iterations : 1
Converged reason = 2.000
----------- Solve for t=0.445 -----------
Solving snes_1407
0 SNES Function norm 4.423705626749e-06
1 SNES Function norm 5.114034021877e-18
Number of iterations : 1
Converged reason = 2.000
----------- Solve for t=0.469 -----------
Solving snes_1407
0 SNES Function norm 4.184044810816e-06
1 SNES Function norm 4.917795788429e-18
Number of iterations : 1
Converged reason = 2.000
----------- Solve for t=0.492 -----------
Solving snes_1407
0 SNES Function norm 3.979570006453e-06
1 SNES Function norm 4.604128341068e-18
Number of iterations : 1
Converged reason = 2.000
----------- Solve for t=0.514 -----------
Solving snes_1407
0 SNES Function norm 3.802431233024e-06
1 SNES Function norm 4.451273211822e-18
Number of iterations : 1
Converged reason = 2.000
----------- Solve for t=0.535 -----------
Solving snes_1407
0 SNES Function norm 3.647031369972e-06
1 SNES Function norm 4.311190478769e-18
Number of iterations : 1
Converged reason = 2.000
----------- Solve for t=0.555 -----------
Solving snes_1407
0 SNES Function norm 3.509257331883e-06
1 SNES Function norm 4.212325735932e-18
Number of iterations : 1
Converged reason = 2.000
----------- Solve for t=0.574 -----------
Solving snes_1407
0 SNES Function norm 3.386009500771e-06
1 SNES Function norm 4.043951657917e-18
Number of iterations : 1
Converged reason = 2.000
----------- Solve for t=0.593 -----------
Solving snes_1407
0 SNES Function norm 3.274901613917e-06
1 SNES Function norm 3.911460812000e-18
Number of iterations : 1
Converged reason = 2.000
----------- Solve for t=0.612 -----------
Solving snes_1407
0 SNES Function norm 3.174062612891e-06
1 SNES Function norm 3.783793126721e-18
Number of iterations : 1
Converged reason = 2.000
----------- Solve for t=0.629 -----------
Solving snes_1407
0 SNES Function norm 3.082001880404e-06
1 SNES Function norm 3.636060449099e-18
Number of iterations : 1
Converged reason = 2.000
----------- Solve for t=0.647 -----------
Solving snes_1407
0 SNES Function norm 2.997515209362e-06
1 SNES Function norm 3.588348277229e-18
Number of iterations : 1
Converged reason = 2.000
----------- Solve for t=0.663 -----------
Solving snes_1407
0 SNES Function norm 2.919617707671e-06
1 SNES Function norm 3.510435222575e-18
Number of iterations : 1
Converged reason = 2.000
----------- Solve for t=0.680 -----------
Solving snes_1407
0 SNES Function norm 2.847494968762e-06
1 SNES Function norm 3.343790376819e-18
Number of iterations : 1
Converged reason = 2.000
----------- Solve for t=0.696 -----------
Solving snes_1407
0 SNES Function norm 2.780466906777e-06
1 SNES Function norm 3.293945403307e-18
Number of iterations : 1
Converged reason = 2.000
----------- Solve for t=0.711 -----------
Solving snes_1407
0 SNES Function norm 2.717960548285e-06
1 SNES Function norm 3.200796577761e-18
Number of iterations : 1
Converged reason = 2.000
----------- Solve for t=0.727 -----------
Solving snes_1407
0 SNES Function norm 2.659489271449e-06
1 SNES Function norm 3.164753726943e-18
Number of iterations : 1
Converged reason = 2.000
----------- Solve for t=0.742 -----------
Solving snes_1407
0 SNES Function norm 2.604636761237e-06
1 SNES Function norm 3.089524577033e-18
Number of iterations : 1
Converged reason = 2.000
----------- Solve for t=0.756 -----------
Solving snes_1407
0 SNES Function norm 2.553044464577e-06
1 SNES Function norm 3.049122990898e-18
Number of iterations : 1
Converged reason = 2.000
----------- Solve for t=0.771 -----------
Solving snes_1407
0 SNES Function norm 2.504401677443e-06
1 SNES Function norm 2.967803611813e-18
Number of iterations : 1
Converged reason = 2.000
----------- Solve for t=0.785 -----------
Solving snes_1407
0 SNES Function norm 2.458437635163e-06
1 SNES Function norm 3.538927509917e-06
2 SNES Function norm 1.871413434255e-07
3 SNES Function norm 1.158847500330e-10
Number of iterations : 3
Converged reason = 2.000
----------- Solve for t=0.799 -----------
Solving snes_1407
0 SNES Function norm 2.414918537484e-06
1 SNES Function norm 7.738678837382e-06
2 SNES Function norm 1.843671261830e-07
3 SNES Function norm 1.867059847297e-10
Number of iterations : 3
Converged reason = 2.000
----------- Solve for t=0.812 -----------
Solving snes_1407
0 SNES Function norm 2.373618380388e-06
1 SNES Function norm 6.880217922403e-06
2 SNES Function norm 1.117299678556e-07
3 SNES Function norm 4.172671410775e-10
Number of iterations : 3
Converged reason = 2.000
----------- Solve for t=0.826 -----------
Solving snes_1407
0 SNES Function norm 2.334376750997e-06
1 SNES Function norm 6.838509453154e-06
2 SNES Function norm 7.079837001069e-08
3 SNES Function norm 2.945301850321e-10
Number of iterations : 3
Converged reason = 2.000
----------- Solve for t=0.839 -----------
Solving snes_1407
0 SNES Function norm 2.297019387248e-06
1 SNES Function norm 6.774428334492e-06
2 SNES Function norm 2.664478104981e-07
3 SNES Function norm 3.215166735814e-08
4 SNES Function norm 4.952603570445e-11
Number of iterations : 4
Converged reason = 2.000
----------- Solve for t=0.852 -----------
Solving snes_1407
0 SNES Function norm 2.261406815646e-06
1 SNES Function norm 6.444717910629e-06
2 SNES Function norm 3.090387008347e-07
3 SNES Function norm 5.770342365700e-08
4 SNES Function norm 1.117267872316e-10
Number of iterations : 4
Converged reason = 2.000
----------- Solve for t=0.865 -----------
Solving snes_1407
0 SNES Function norm 2.227394741418e-06
1 SNES Function norm 6.703048707110e-06
2 SNES Function norm 4.906848940235e-07
3 SNES Function norm 3.899229335097e-08
4 SNES Function norm 1.101097962877e-10
Number of iterations : 4
Converged reason = 2.000
----------- Solve for t=0.877 -----------
Solving snes_1407
0 SNES Function norm 2.194872442172e-06
1 SNES Function norm 6.287499089424e-06
2 SNES Function norm 7.418930781312e-07
3 SNES Function norm 7.061132144063e-08
4 SNES Function norm 2.984252126827e-09
Number of iterations : 4
Converged reason = 2.000
----------- Solve for t=0.890 -----------
Solving snes_1407
0 SNES Function norm 2.163736510305e-06
1 SNES Function norm 6.289810577963e-06
2 SNES Function norm 8.516911927481e-07
3 SNES Function norm 1.031884277581e-07
4 SNES Function norm 2.211724345705e-10
Number of iterations : 4
Converged reason = 2.000
----------- Solve for t=0.902 -----------
Solving snes_1407
0 SNES Function norm 2.133885520022e-06
1 SNES Function norm 6.105528449095e-06
2 SNES Function norm 1.099403704044e-06
3 SNES Function norm 1.594899567612e-07
4 SNES Function norm 3.292908358084e-10
Number of iterations : 4
Converged reason = 2.000
----------- Solve for t=0.914 -----------
Solving snes_1407
0 SNES Function norm 2.105236001433e-06
1 SNES Function norm 5.976694690864e-06
2 SNES Function norm 1.488143819323e-06
3 SNES Function norm 1.710276833819e-07
4 SNES Function norm 3.596243981589e-10
Number of iterations : 4
Converged reason = 2.000
----------- Solve for t=0.926 -----------
Solving snes_1407
0 SNES Function norm 2.077711733022e-06
1 SNES Function norm 5.902811847240e-06
2 SNES Function norm 1.711605163564e-06
3 SNES Function norm 3.165491948507e-07
4 SNES Function norm 1.006646959053e-08
5 SNES Function norm 1.821523918781e-11
Number of iterations : 5
Converged reason = 2.000
----------- Solve for t=0.938 -----------
Solving snes_1407
0 SNES Function norm 2.051245844101e-06
1 SNES Function norm 5.818883102926e-06
2 SNES Function norm 2.529157107064e-06
3 SNES Function norm 1.371381154761e-07
4 SNES Function norm 2.994700728506e-10
Number of iterations : 4
Converged reason = 2.000
----------- Solve for t=0.950 -----------
Solving snes_1407
0 SNES Function norm 2.025757868161e-06
1 SNES Function norm 5.756101142103e-06
2 SNES Function norm 3.550015544960e-06
3 SNES Function norm 1.150750549546e-07
4 SNES Function norm 2.869400985327e-10
Number of iterations : 4
Converged reason = 2.000
----------- Solve for t=0.961 -----------
Solving snes_1407
0 SNES Function norm 2.001199831471e-06
1 SNES Function norm 5.614245002418e-06
2 SNES Function norm 4.501832127319e-06
3 SNES Function norm 1.593810440029e-07
4 SNES Function norm 7.007597404905e-10
Number of iterations : 4
Converged reason = 2.000
----------- Solve for t=0.973 -----------
Solving snes_1407
0 SNES Function norm 1.977507348149e-06
1 SNES Function norm 5.534811677359e-06
2 SNES Function norm 6.529200707449e-06
3 SNES Function norm 2.213238097169e-07
4 SNES Function norm 2.635671221205e-09
Number of iterations : 4
Converged reason = 2.000
----------- Solve for t=0.984 -----------
Solving snes_1407
0 SNES Function norm 1.954618901814e-06
1 SNES Function norm 5.391441522476e-06
2 SNES Function norm 9.361568508348e-06
3 SNES Function norm 4.756948927090e-07
4 SNES Function norm 3.600845992220e-08
5 SNES Function norm 8.047521068963e-11
Number of iterations : 5
Converged reason = 2.000
----------- Solve for t=0.995 -----------
Solving snes_1407
0 SNES Function norm 1.932564618759e-06
1 SNES Function norm 5.306158124433e-06
2 SNES Function norm 1.547564462803e-05
3 SNES Function norm 5.514160871999e-06
4 SNES Function norm 8.833943508139e-08
5 SNES Function norm 8.951351416847e-10
Number of iterations : 5
Converged reason = 2.000
----------- Solve for t=1.006 -----------
Solving snes_1407
0 SNES Function norm 1.910980518108e-06
1 SNES Function norm 2.343266408145e-05
2 SNES Function norm 2.456944785581e-06
3 SNES Function norm 3.624573726184e-07
4 SNES Function norm 5.052630220200e-09
Number of iterations : 4
Converged reason = 2.000
----------- Solve for t=1.017 -----------
Solving snes_1407
0 SNES Function norm 1.940636982748e-06
1 SNES Function norm 6.366048636060e-07
2 SNES Function norm 4.679917534790e-07
3 SNES Function norm 8.858964711059e-09
Number of iterations : 3
Converged reason = 2.000
----------- Solve for t=1.028 -----------
Solving snes_1407
0 SNES Function norm 1.926606007679e-06
1 SNES Function norm 1.019562176171e-04
2 SNES Function norm 4.288365968261e-05
3 SNES Function norm 2.070202986254e-06
4 SNES Function norm 4.216873169494e-08
5 SNES Function norm 2.266334964885e-10
Number of iterations : 5
Converged reason = 2.000
----------- Solve for t=1.038 -----------
Solving snes_1407
0 SNES Function norm 1.862270473408e-06
1 SNES Function norm 9.581495130386e-06
2 SNES Function norm 1.930379802139e-06
3 SNES Function norm 1.899481473357e-09
Number of iterations : 3
Converged reason = 2.000
----------- Solve for t=1.049 -----------
Solving snes_1407
0 SNES Function norm 1.832415635343e-06
1 SNES Function norm 5.320563252648e-06
2 SNES Function norm 6.095604230666e-07
3 SNES Function norm 3.283420830415e-11
Number of iterations : 3
Converged reason = 2.000
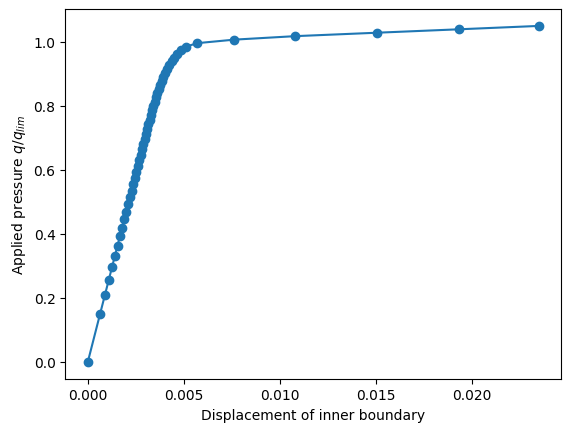
import matplotlib.pyplot as plt
plt.plot(results[:, 0], results[:, 1], "-o")
plt.xlabel("Displacement of inner boundary")
plt.ylabel(r"Applied pressure $q/q_{lim}$")
plt.show()